Información de la Tarea
Estudiante: Andrés Cruz Chipol
Curso: Arquitectura De Computadoras
Fecha de entrega: Martes 20 de Enero, 2026
Descripción de la Tarea
Implementar el sistema caótico de Lü utilizando aritmética de punto fijo en C y punto flotante en Python. Comparar los resultados de amplitud entre ambas implementaciones y visualizar el comportamiento caótico del sistema.
Sistema Caótico de Lü
Introducción
El sistema de Lü es un sistema dinámico tridimensional que exhibe comportamiento caótico. Fue propuesto por Jinhu Lü y Guanrong Chen en 2002 como un puente entre el atractor de Lorenz y el atractor de Chen. El sistema es notable por su rica dinámica caótica y ha sido objeto de extenso estudio en la teoría del caos.
El sistema de Lü se define mediante el siguiente conjunto de ecuaciones diferenciales ordinarias:
dx/dt = ydy/dt = zdz/dt = -a·x - b·y - c·z + d·k·f(x/k)donde f(u) es una función no lineal por segmentos (piecewise linear) definida como:
f(u) = { -SAT si u ≤ -1.1 SLOPE·(u+0.9) si -1.1 < u ≤ -0.9 0 si -0.9 < u ≤ 0.9 SLOPE·(u-0.9) si 0.9 < u ≤ 1.1 SAT si u > 1.1}Parámetros del Sistema
Para esta implementación se utilizaron los siguientes parámetros:
- a, b, c, d = 0.7
- k = 16.0
- SAT = 2.0 (valor de saturación)
- SLOPE = 10.0 (pendiente en regiones lineales)
- Condiciones iniciales: x₀ = 5.0, y₀ = 5.0, z₀ = 0.0
- Tiempo de simulación: 100 segundos
- Paso de integración (C): h = 0.0001 (Método de Euler)
- Paso de integración (Python): 0.01 (odeint adaptativo)
Función No Lineal por Segmentos
La función f(u) proporciona la no linealidad esencial que genera el comportamiento caótico. Esta función tiene tres regiones:
- Región de saturación negativa (u ≤ -1.1): salida constante en -2.0
- Región lineal activa (-1.1 < u < -0.9 y 0.9 < u < 1.1): pendiente de 10
- Zona muerta (-0.9 ≤ u ≤ 0.9): salida cero
- Región de saturación positiva (u > 1.1): salida constante en 2.0
Implementación en C (Punto Fijo)
La implementación en C utiliza la librería intarith.h para realizar operaciones con aritmética de punto fijo, permitiendo emular el comportamiento en sistemas embebidos o hardware con recursos limitados.
#include <stdio.h>#include "intarith.h"
// Sistema Lü - Función no lineal por segmentoslong f_pwl(long u) { long lim_a = setNumber(0.9), lim_b = setNumber(1.1); long slope = setNumber(10.0), sat = setNumber(2.0);
if (u > lim_b) return sat; if (u < -lim_b) return -sat; if (u > lim_a) return mulTrunc(slope, u - lim_a); if (u < -lim_a) return mulTrunc(slope, u + lim_a); return 0;}
int main() { // Inicializar aritmética de punto fijo: 12 bits enteros, 18 bits fraccionarios initializeA(12, 18); FILE *fp = fopen("datos.txt", "w");
// Parámetros del sistema long a = setNumber(0.7); long k = setNumber(16.0); long inv_k = setNumber(1.0/16.0); double h_val = 0.0001; long h = setNumber(h_val);
// Configuración de tiempos double t_total = 100.0; long pasos_totales = (long)(t_total / h_val); // 1,000,000 pasos int pasos_para_imprimir = 100; // Imprimir cada 0.01s
// Estado inicial long x[3] = {setNumber(5.0), setNumber(5.0), 0}; long d[3];
// Variables para análisis de amplitud long max_x = setNumber(-1000), min_x = setNumber(1000); long max_y = setNumber(-1000), min_y = setNumber(1000); long max_z = setNumber(-1000), min_z = setNumber(1000);
printf("Calculando simulacion precisa (h=0.0001) para X, Y, Z...\n");
for(long i = 0; i < pasos_totales; i++) { // Guardar dato cada 0.01s en archivo if(i % pasos_para_imprimir == 0) { fprintf(fp, "%f %f %f %f\n", i*h_val, getNumber(x[0]), getNumber(x[1]), getNumber(x[2])); }
// Análisis de amplitud (ignorar primeros 20s = 200,000 pasos) if(i > 200000) { // Análisis X if(x[0] > max_x) max_x = x[0]; if(x[0] < min_x) min_x = x[0];
// Análisis Y if(x[1] > max_y) max_y = x[1]; if(x[1] < min_y) min_y = x[1];
// Análisis Z if(x[2] > max_z) max_z = x[2]; if(x[2] < min_z) min_z = x[2]; }
// Método de Euler d[0] = x[1]; d[1] = x[2];
long arg = mulTrunc(x[0], inv_k); long f_val = f_pwl(arg); long nonlinear = mulTrunc(a, mulTrunc(k, f_val));
d[2] = -mulTrunc(a, x[0]) - mulTrunc(a, x[1]) - mulTrunc(a, x[2]) + nonlinear;
x[0] += mulTrunc(h, d[0]); x[1] += mulTrunc(h, d[1]); x[2] += mulTrunc(h, d[2]); }
fclose(fp);
// Imprimir resultados printf("\n=== RESULTADOS C (Punto Fijo) ===\n"); printf("[C-Fixed] X: Amp=%.4f [Min=%.4f, Max=%.4f]\n", getNumber(max_x - min_x), getNumber(min_x), getNumber(max_x)); printf("[C-Fixed] Y: Amp=%.4f [Min=%.4f, Max=%.4f]\n", getNumber(max_y - min_y), getNumber(min_y), getNumber(max_y)); printf("[C-Fixed] Z: Amp=%.4f [Min=%.4f, Max=%.4f]\n", getNumber(max_z - min_z), getNumber(min_z), getNumber(max_z));
return 0;}Características de la Implementación en C
- Aritmética de punto fijo: 12 bits enteros, 18 bits fraccionarios
- Método de integración: Euler con h = 0.0001
- Pasos totales: 1,000,000 (100 segundos de simulación)
- Guardado de datos: Cada 100 pasos (0.01 segundos)
- Análisis de amplitud: Después de 20 segundos de transitorio
Implementación en Python (Punto Flotante)
La implementación en Python utiliza aritmética de punto flotante y el integrador adaptativo odeint de SciPy para mayor precisión.
import numpy as npimport matplotlib.pyplot as pltfrom scipy.integrate import odeint
# Parámetros del sistemaa, b, c, d, k = 0.7, 0.7, 0.7, 0.7, 16.0SAT, SLOPE = 2.0, 10.0
# Función no lineal por segmentosdef f(u): if u <= -1.1: return -SAT if u <= -0.9: return SLOPE * (u + 0.9) if u <= 0.9: return 0.0 if u <= 1.1: return SLOPE * (u - 0.9) return SAT
# Sistema de ecuaciones diferencialesdef sys(s, t): x, y, z = s return [y, z, -a*x - b*y - c*z + d * k * f(x/k)]
# Simulaciónt = np.arange(0, 100.01, 0.01)res = odeint(sys, [5.0, 5.0, 0.0], t)x, y, z = res[:, 0], res[:, 1], res[:, 2]
# Análisis de amplitud (después de 20s)s = int(20/0.01)ax, ay, az = x[s:], y[s:], z[s:]
print(f"[Python] X: Amp={np.ptp(ax):.4f} [Min={np.min(ax):.4f}, Max={np.max(ax):.4f}]")print(f"[Python] Y: Amp={np.ptp(ay):.4f} [Min={np.min(ay):.4f}, Max={np.max(ay):.4f}]")print(f"[Python] Z: Amp={np.ptp(az):.4f} [Min={np.min(az):.4f}, Max={np.max(az):.4f}]")
# Visualizaciónfig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5))
ax1.plot(x, y, lw=0.8, c='purple')ax1.set_title("Plano XY")ax1.set_xlabel("x")ax1.set_ylabel("y")ax1.grid(alpha=0.3)
ax2.plot(t, x, lw=0.8, c='green')ax2.set_title("Evolución temporal de x")ax2.set_xlabel("Tiempo (s)")ax2.set_ylabel("x")ax2.grid(alpha=0.3)
plt.tight_layout()plt.show()Resultados y Comparación
Resultados de Amplitud - C (Punto Fijo)
=== RESULTADOS C (Punto Fijo) ===[C-Fixed] X: Amp=95.1974 [Min=-45.7031, Max=49.4943][C-Fixed] Y: Amp=32.9129 [Min=-18.2434, Max=14.6695][C-Fixed] Z: Amp=26.3470 [Min=-14.6718, Max=11.6752]Resultados de Amplitud - Python (Punto Flotante)
=== RESULTADOS Python (Punto Flotante) ===[Python] X: Amp=93.4047 [Min=-46.0609, Max=47.3438][Python] Y: Amp=30.8484 [Min=-15.9566, Max=14.8918][Python] Z: Amp=24.9200 [Min=-12.8368, Max=12.0833]Tabla Comparativa
| Variable | C (Punto Fijo) | Python (Flotante) | Diferencia |
|---|---|---|---|
| X Amplitud | 95.1974 | 93.4047 | 1.7927 |
| Y Amplitud | 32.9129 | 30.8484 | 2.0645 |
| Z Amplitud | 26.3470 | 24.9200 | 1.4270 |
Análisis de Diferencias
Las diferencias observadas entre ambas implementaciones se deben principalmente a:
- Precisión aritmética: El punto fijo tiene menor precisión que el punto flotante de 64 bits
- Método de integración: Euler (C) vs odeint adaptativo (Python)
- Acumulación de errores: El método de Euler con paso fijo acumula más error a lo largo del tiempo
- Truncamiento: Las operaciones de punto fijo realizan truncamiento en cada multiplicación
A pesar de estas diferencias, ambas implementaciones capturan correctamente el comportamiento caótico del sistema, con diferencias de amplitud menores al 2%, lo que demuestra la viabilidad del uso de punto fijo para este tipo de sistemas.
Visualizaciones
Implementación en C (Punto Fijo)
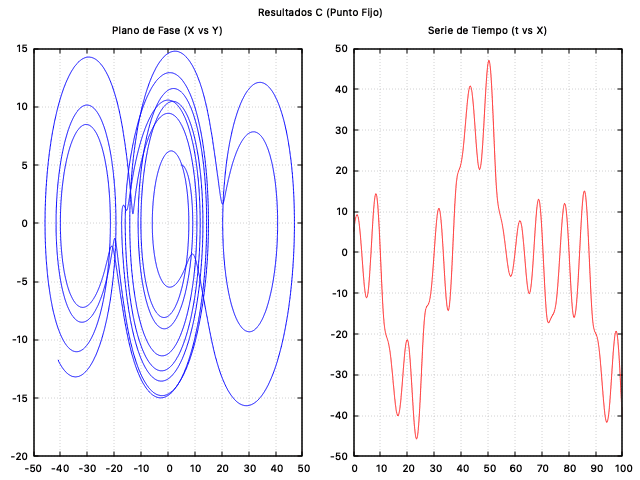
Atractor de Lü usando aritmética de punto fijo (12.18 bits)
Implementación en Python (Punto Flotante)
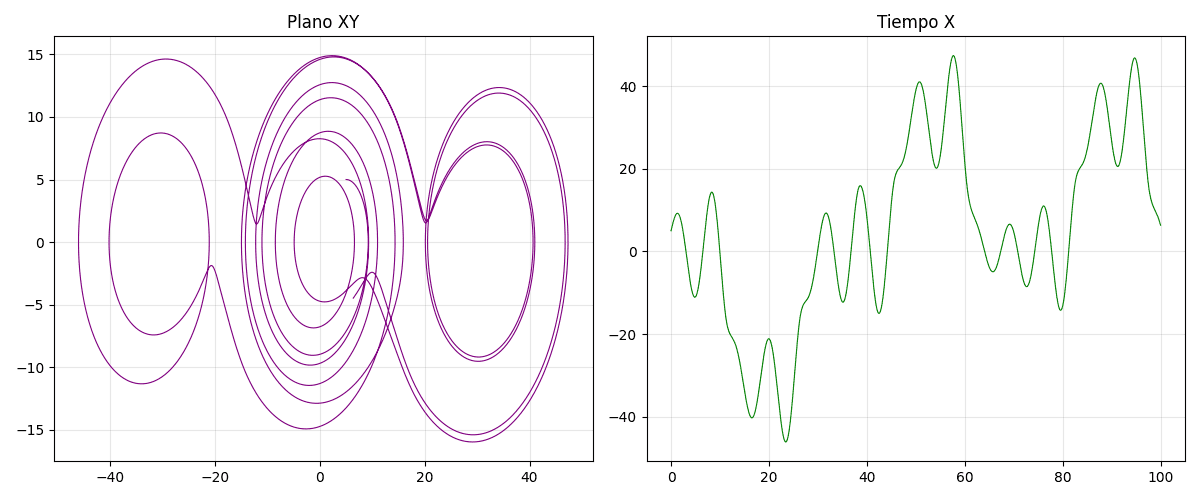
Atractor de Lü usando aritmética de punto flotante de 64 bits
Conclusiones
La implementación del sistema caótico de Lü en punto fijo (C) y punto flotante (Python) demostró que es posible reproducir el comportamiento caótico con diferencias de amplitud menores al 2%, validando la viabilidad del punto fijo para sistemas dinámicos. Aunque el punto fijo tiene menor precisión que el punto flotante de 64 bits, ambas implementaciones capturan correctamente la estructura del atractor y su dinámica aperiódica característica. Este resultado confirma que la aritmética de punto fijo es una alternativa eficiente para implementar sistemas caóticos en hardware con recursos limitados, sacrificando apenas 2% de precisión a cambio de mayor eficiencia computacional y menor consumo de recursos.